:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/To-10-Antutu-Iunie-1.jpg)
Demonstrat de un startup numit OpenAI, braţul umanoid Dactyl funcţionează pe baza experienţei căpătate în lumea virtuală, improvizând soluţii pentru probleme reale.
Dezvoltat în ultimele 12 luni, acesta este controlat de un motor de inteligenţă artificială numit OpenAI Five. Sistemul se poate antrena pentru activităţi în lumea reală repetând mai întâi mişcările într-o simulare VR. Pentru ca totul să funcţioneze, braţul Dactyl trebuie adapteze experienţa căpătată în simulări şi să folosească informaţii vizuale imprecise, obţinute cu ajutorul mai multor camere video.
Mai puţin predictibilă decât în mediul virtual, mâna robotizată are o libertate de mişcare comparabilă celei umane.
Adaptat pentru a improviza, braţul Dactyl poate îndeplini în mod realist mai multe exerciţii care ar testa până şi dexteritatea unui om. În demonstraţia oferită este folosit un cub, care trebuie rotit pentru a arăta la partea de sus litera dorită.
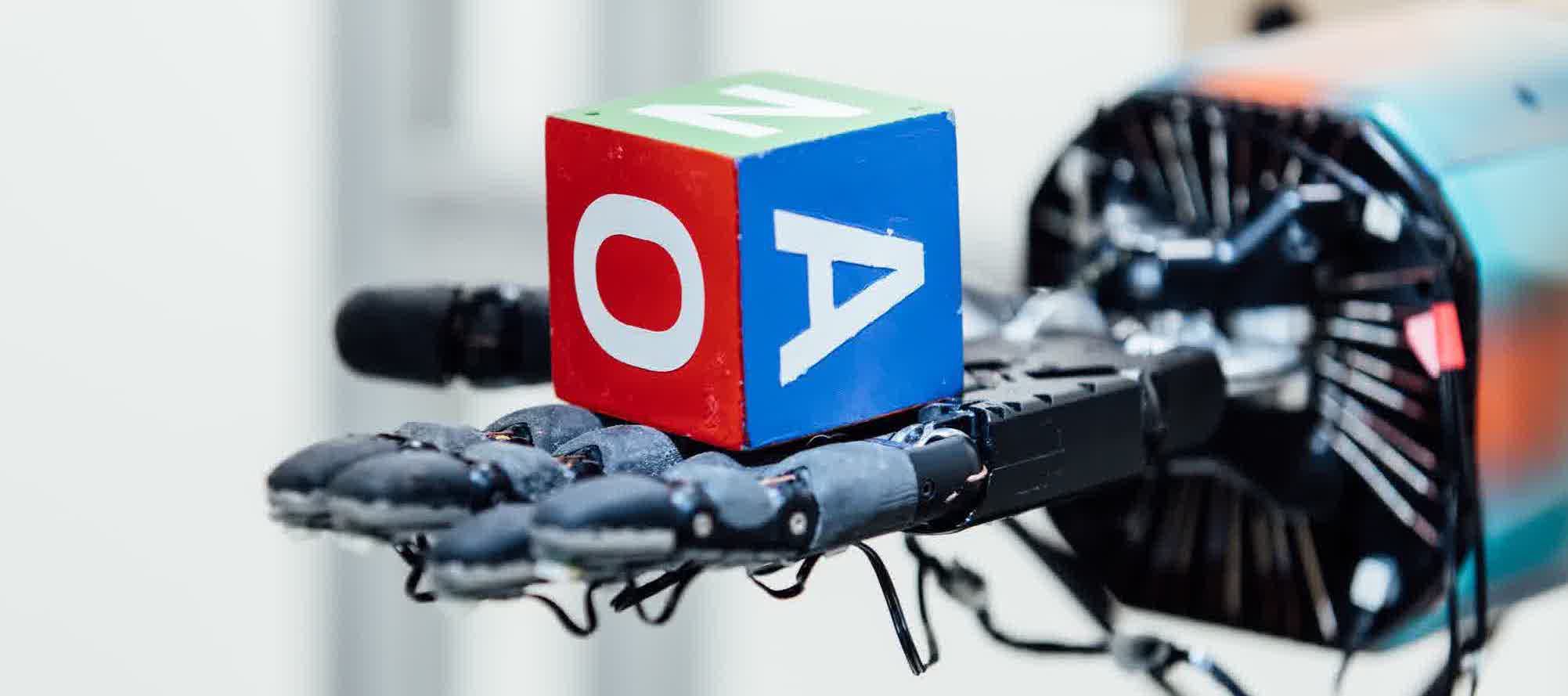
Sistemul AI este însă capabil să improvizeze şi manevrarea altor obiecte cu formă şi geometrie diferită, pe baza experienţei căpătate în simulările făcute în lumea virtuală.
Tehnologiile dezvoltate de OpenAI ar putea face posibilă o nouă generaţie de roboţi industriali, capabili să rezolve sarcini complexe în lumea reală fără a avea nevoie de informaţii precise despre mediul înconjurător, sau programarea în avans a fiecărei manevre executate.
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2021/06/196232835_822063672017015_4368866468264133150_n.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/top-3-unelte-parkside.jpg)
:format(webp):quality(80)/http://www.go4it.ro/wp-content/uploads/sfm/2025/07/1687505631/34ff696edc66b1109a55c8d93a798aed-t.jpg)
:format(webp):quality(80)/http://www.go4it.ro/wp-content/uploads/sfm/2022/06/1611647114/d9aca6be52abcdf542023fc84ce08d73-t.jpg)
:format(webp):quality(80)/http://www.go4it.ro/wp-content/uploads/sfm/2025/06/1611647128/99a5423eee529c1e1d1ee62cbc9df3c9-t.jpg)
:format(webp):quality(80)/http://www.go4it.ro/wp-content/uploads/sfm/1970/01/1590137965/e97226161087f6eac9997fdd2171854e-t.jpg)
:format(webp):quality(80)/http://www.go4it.ro/wp-content/uploads/sfm/2025/07/1600349450/d0342959de8d3d19a5180729e80518e4-t.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/5-gadgeturi-care-neau-schimbat-viata-in-ultimii-10-ani-p.jpeg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/te-ingrasi-chiar-daca-mananci-corect-4-combinatii-alimentare-care-iti-blocheaza-digestia-p.jpeg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2021/12/samsung-tri-fold-smartphone.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2024/12/studiu-curelele-smartwatch-urilor-ar-putea-contine-chimicale-periculoase-tot-ce-se-stie.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/sfm/2025/07/1590576175/96849737cb3b0ce636229a7252132872-t.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/sfm/2025/07/1590576175/eb36ba1df4d6fdd50e9229d358a45cb2-t.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/sfm/2025/07/1593777542/7cc5c02a28be848ef6c40648db310b77-t.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/sfm/2025/07/1593777542/8b7884e5c0401712c9e5af07d06a2c8f-t.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/03/apple-watch-ultra-go4it-1.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/05/Samsung-Galaxy-S25_2.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/Xbox_Microsoft-e1751611641233.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/Philips-32M3C3540-Monitor.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2021/01/Starlink_Mission_47926144123.jpg)
:format(webp):quality(80)/https://www.go4it.ro/wp-content/uploads/2025/07/doua-produse-parkside-la-lidl-perfecte-pentru-intretinerea-masinii-in-curte-1647x1080.jpg)